
SCADA (HMI) แจ้งเตือน Alarm ผ่านไลน์
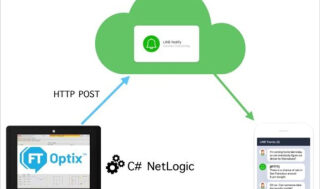
SCADA (HMI) แจ้งเตือน Alarm ผ่านไลน์ (“FactoryTalk Optix และ LINE Notify) สวัสดีครับ หลายท่านคงทราบกันดีถึงกระแสของการปฏิวัติอุตสาหกรรม 4.0 ซึ่งเทคโนโลยีหนึ่งที่นับเป็นหัวใจสำคัญของยุคสมัยนี้ก็คือ Industrial Internet of Things (IIoT) ซึ่งหมายถึงการใช้งานอินเตอร์เน็ตเข้ามามีส่วนร่วมในการสื่อสารระหว่างเครื่องจักรและผู้คนได้อย่างง่ายดายมากขึ้น โดยใช้การสื่อสารที่รวดเร็ว ให้ข้อมูลที่เป็นปัจจุบัน ถูกต้อง นำมาซึ่งการติดสินใจได้อย่างรวดเร็วและทันกับสถานการณ์ วันนี้เราขอนำเสนอเทคโนโลยีง่ายๆ ซึ่งเชื่อว่าทุกท่านใช้เป็นส่วนหนึ่งของชีวิตประจำวันอยู่แล้ว นั่นคือ LINE Application ซึ่งสามารถนำมาเป็นเครื่องมือหนึ่งที่ใช้ในการแจ้งเตือนได้เป็นอย่างดี ข้อดีของ LINE Application 1. ใช้งานได้ฟรี 2. มีฐานผู้ใช้งานจำนวนมาก 3. สามารถปฏิบัติงานร่วมกันได้แบบกลุ่ม 4. สามารถ Integrate เข้ากับระบบอื่นได้ง่าย อย่างไรก็ดี ข้อเสียของการใช้ LINE ในการทำงานก็มีพูดถึงกันมากมาย เช่น ระบบจัดเก็บข้อมูลย้อนหลังที่ทำได้ไม่ดี รวมถึงการปะปนกันระหว่างเรื่องงานและเรื่องส่วนตัว แต่ถึงกระนั้น การนำ LINE เข้ามาเป็น “ส่วนหนึ่ง” […]



