
เซอร์โวมอเตอร์ตอนที่ 3 การเลือกขนาดมอเตอร์
เซอร์โวมอเตอร์ (servo motor) ตอนที่ 3(การเลือกขนาดมอเตอร์)
การเลือกขนาดเซอร์โวมอเตอร์ให้เหมาะสมกับงานนั้นยากกว่าการเลือกขนาดอินดักชั่นมอเตอร์แบบทั่วไป เพราะไม่เพียงแต่ต้องคำนึงถึงอัตราเร่งความเร็ว อัตราการชะลอตัวและแรงบิดในการขับโหลดเท่านั้น แต่ยังรวมถึงความสามารถของเซอร์โวมอเตอร์ในการควบคุมความเร็ว ตำแหน่งหรือแรงบิด ซึ่งเราต้องคำนวณแรงบิดสูงสุด(peak torque) อัตราเร่งความเร็วและอัตราชลอความเร็ว ตลอดจนแรงบิดขณะขับโหลดปกติ(normal torque) นอกจากนี้ต้องคำนวณความเฉื่อย(inertia)ของระบบ (Inertia คือ ความต้านทานต่อการเปลี่ยนแปลงความเร็ว) เพื่อให้แน่ใจว่ามอเตอร์ไม่ร้อนเกินไปในระหว่างการใช้งาน นอกจากนี้การจับคู่ความเฉื่อยระหว่างมอเตอร์และโหลดเป็นสิ่งที่จำเป็นเพื่อให้แน่ใจว่ามีการตอบสนองและประสิทธิภาพของระบบที่เหมาะสม
ต่อไปเราจะตรวจสอบปัจจัยสำคัญเหล่านี้ เพื่อใช้ประกอบการเลือกขนาดมอเตอร์ให้เหมาะสมกับงาน
INERTIA RATIO
ปัจจัยที่สำคัญประการแรก คือ อัตราส่วนความเฉื่อย(Inertia ratio) วัตถุที่หมุนใดๆ ต้องมีความเฉื่อย ความเฉื่อยคือความต้านทานการเปลี่ยนความเร็วในการหมุนของวัตถุนั้น ความเฉื่อยทั้งหมดของระบบเซอร์โวมอเตอร์สามารถแบ่งออกเป็นสองส่วน คือ ความเฉื่อยของมอเตอร์ และ ความเฉื่อยของโหลด
ความเฉื่อยของมอเตอร์(Motor inertia) JM จะระบุไว้ในแคตตาล็อกของผู้ผลิต ส่วนความเฉื่อยของโหลด(Load inertia) JL มักประกอบด้วยหลายชิ้นส่วนที่ประกอบเข้าด้วยกัน ทุกองค์ประกอบที่ถูกขับด้วยมอเตอร์จะถูกรวมกันเป็นความเฉื่อยของโหลดทั้งหมด ซึ่งต้องใช้การคำนวณต่างๆ เพื่อให้ได้ค่าความเฉื่อยขององค์ประกอบทั้งหมดนั้น
Inertia ratio = JL/JM โดยทั่วไปอัตราส่วนความเฉื่อย 5: 1 เป็นอัตราปกติ หากประสิทธิภาพเป็นเรื่องไม่สำคัญการใช้อัตรา 10: 1 หรือสูงกว่าก็เพียงพอต่อการใช้งานแล้ว แต่ถ้าต้องการประสิทธิภาพสูงสุดเราอาจพิจารณาอัตราส่วนความเฉื่อยที่ 2: 1 เนื่องจากการปรับลูปควบคุมทำได้ง่ายกว่าและประสิทธิภาพของเครื่องจักรที่เพิ่มขึ้นในอัตราส่วนที่ต่ำกว่า แต่ข้อเสียของการเลือกอัตราส่วนความเฉื่อยที่ต่ำมากหมายความว่าคุณอาจได้มอเตอร์ขนาดใหญ่และมีราคาแพงมากเมื่อเทียบกับประสิทธิภาพที่ได้รับ
SPEED
อีกปัจจัยที่สำคัญในการเลือกขนาดมอเตอร์ คือ ความเร็ว เราต้องทราบว่าโหลดเคลื่อนที่เร็วแค่ไหนและไกลแค่ไหน เราต้องทราบโปรไฟล์การเคลื่อนที่ รูปที่ 1 แสดงตัวอย่างโปนไฟล์การเคลื่อนที่ หากเรากำลังใช้มอเตอร์กับงานที่ต้องการเคลื่อนที่ซ้ำ ๆ จะช่วยในการกำหนดความเร็วมอเตอร์ที่ต้องการตลอดรอบการทำงาน อย่าลืมเผื่อการเร่งความเร็วและการชลอความเร็ว สำหรับการทำงานที่ไม่ทำซ้ำให้หาความเร็วสูงสุดและอัตราเร่งที่ต้องการก็เพียงพอแล้ว
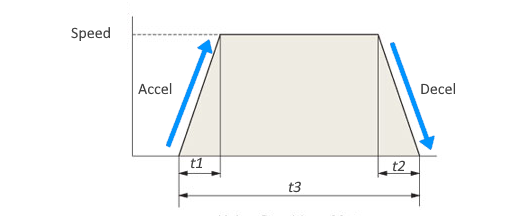
รูปที่ 1
CONTINUEOUS(RMS) TORQUE
แรงบิด คือ ความต้องการใช้แรงเท่าใดในการหมุนโหลด แรงบิดต่อเนื่องหรือ RMS คือ ค่าเฉลี่ยถ่วงน้ำหนักตามเวลาของแรงบิดระหว่างรอบการทำงานของเครื่องจักรหรือรอบของการเคลื่อนที่ ในการเลือกขนาดมอเตอร์ให้เหมาะสมและป้องกันความร้อนสูงเกินไป แรงบิด RMS นี้จะต้องอยู่ภายใต้พื้นที่ของ Continuous operating (รูปที่ 2 เส้นสีเขียว) ของ Torque-Speed Curve
PEAK TORQUE
แรงบิดที่จุดเริ่มต้นของการเคลื่อนที่จะสูงที่สุดเนื่องจากต้องเอาชนะแรงเสียดทานทางกลและภาระการเร่งตัว จุดที่มีแรงบิดสูงสุดนี้เรียกว่า Peak(Max) Torque เมื่อโหลดเริ่มเคลื่อนที่และมีความเร็วตามที่ต้องการจะใช้แรงบิดเพียงเล็กน้อยเพื่อเอาชนะแรงเสียดทานและรักษาความเร็ว เมื่อต้องการลดความเร็วของโหลดมักจะต้องใช้แรงบิดย้อนกลับ ซึ่งแรงบิดย้อนกลับระหว่างการลดความเร็วจะไม่สูงเท่ากับแรงบิดในขณะเร่งความเร็วเนื่องจากแรงเสียดทานช่วยให้โหลดช้าลง
แต่ถ้าแรงเสียดทานสูงมากอาจต้องใช้แรงบิดเพิ่มขึ้นระหว่างการชะลอตัวเพื่อไม่ให้มอเตอร์ลดความเร็วเร็วเกินไป สิ่งสำคัญคือต้องตรวจสอบให้แน่ใจว่ามอเตอร์สามารถสร้างแรงบิดสูงสุดที่ต้องการได้ที่ความเร็วที่เราต้องการ แรงบิดสูงสุดที่ความเร็วนี้ควรอยู่ในพื้นที่ของเส้น Intermittent operating (รูปที่ 2 เส้นสีฟ้า) ของ Torque-Speed Curve
TORQUE-SPEED CURVE
เมื่อเราทราบค่า Speed, Continuous Torque และ Max Torque ที่ต้องใช้ในการขับโหลดได้แล้ว เราสามารถนำค่าเหล่านี้มาเลือกขนาดที่เหมาะได้โดยใช้ Speed-Torque curve จากผู้ผลิต โดย Curve นี้ช่วยให้มั่นใจได้ว่ามอเตอร์สามารถสร้างแรงบิดและความเร็วที่ต้องการได้ ไม่ว่าจะทำงานต่อเนื่องหรือไม่ต่อเนื่องก็ตาม จากรูปที่ 2 ถ้าระบบต้องการความเร็วที่ 1500 RPM จุดที่ 1 จะแสดง RMS torque สูงสุดที่ 30 N ของมอเตอร์ ส่วนจุดที่ 2 แสดง Peak torque สูงสุดที่ 70 N ของมอเตอร์รุ่นนี้ ถ้าเราคำนวณแล้ว RMS torque และ Peak Torque ต่ำกว่าค่านี้ เราจึงสามารถใช้มอเตอร์ตัวนี้ได้
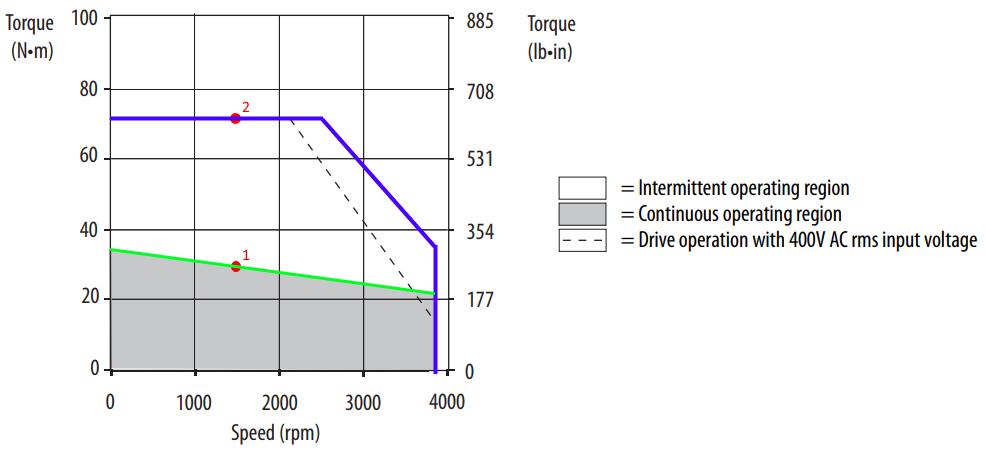
รูปที่ 2
ดังที่กล่าวข้างต้นเป็นปัจจัยสำคัญที่เราต้องพิจารณาในการเลือกขนาดมอเตอร์ แต่ยังมีปัจจัยอื่นที่มักถูกมองข้าม เช่น สภาพแวดล้อมที่มอเตอร์จะทำงาน เซอร์โวมอเตอร์ส่วนใหญ่จะใช้งานกับสภาพแวดล้อมที่มีอุณหภูมิไม่เกิน 40 องศา ในทำนองเดียวกันอุณหภูมิที่เย็นจัดอาจส่งผลต่อน้ำมันหล่อลื่นของมอเตอร์ทำให้มอเตอร์หยุดทำงาน หากมีฝุ่นความชื้นและการปนเปื้อนในสิ่งแวดล้อมคุณจะต้องพิจารณาระดับ IP ที่สูงขึ้นกว่านี้
ดาวน์โหลดคู่มือการใช้งานเซอร์โวมอเตอร์เบื้องต้น คลิก
