เซอร์โวมอเตอร์ตอนที่ 2
เซอร์โวมอเตอร์ (servo motor) ตอนที่ 2

จากบนความ เซอร์โวมอเตอร์ตอนที่ 1
ที่ได้สัญญาไว้ในตอนที่แล้ว ว่าจะมาสอนการสั่งงานเซอร์โว มอเตอร์(Servo Motor) วันนี้ผมมีคำตอบครับ
บทความที่ผมขียนในวันนี้ผมอิงเทคโนโลยีของ Allen Bradleyเป็นส่วนใหญ่ครับ
เราสามารถสั่งงานเซอร์โว มอเตอร์ด้วยวิธีดังต่อไปนี้
1. PTO (pulse train output)
2. Digital หรือ Index
3. Analog
4. Protocol
4.1 Modbus
4.2 Sercos
4.3 Ethernet
วิธีที่ 1 PTO (Pulse Train Output) คืออะไร แตกต่างอย่างไรกับ
PWM (Pulse Width Modulation) หลายๆคนเกิดความสงสัย PTO คือ การจ่ายช่วงคลื่นที่มีความยาวเท่าๆกันออกมา
แต่จะมีความถี่ที่ต่างกันโดยการมาประยุกต์ ใช้กับการสั่งเซอร์โวมอเตอร์นั้นทำโดยเราต้องตั้งค่าความเร็วที่ PLC ว่าจะใช้เท่าไหร่
จะให้ปล่อยสัญญาณ Pulse เท่าไหร่โดยเราต้องตั้งค่าจาdฝั่งเซอร์โว
มอเตอร์ด้วยว่าความถี่เท่าไหร่จะให้มีความเร็วเท่าไหร่ (สามารถสั่งStep Motor ด้วยวิธีนี้ได้เช่นกัน) โดยวิธีนี้ จะเป็น Loop Control
แบบเปิด คือ PLC จะไม่รู้ตำแหน่งจริงของเซอร์โว มอเตอร์ตำแหน่งของเซอร์โว มอเตอร์ได้มาจากการคำนวนดังนั้นการควบคุมแบบ PTO
จะได้ความแม่นยำในตำแหน่งแค่ระดับหนึ่งเท่านั้นTIP ถ้าไดร์ฟเก่าเสีย เราสามารถเปลี่ยนเป็นยี่ห้ออื่นได้โดยที่ไม่ต้องแก้ PLC เพียงแค่ตั้งค่าที่ไดร์ฟ
ว่า Pulse เท่าไหร่แล้วได้ความเร็วเท่าไหร่
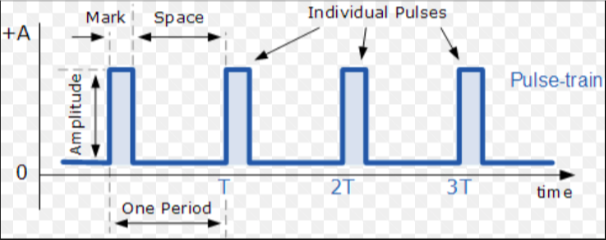
รูปที่ 1
เพิ่มเติมครับ PWM (Pulse Width Modulation)
เป็นการปล่อยสัญญาณที่มีคาบ เท่ากัน แต่ระยะเวลาในการ On - Off
ต่างกัน มักนิยมใช้กับการคุมอุณหภูมิ แบบ On - Off (Digital)
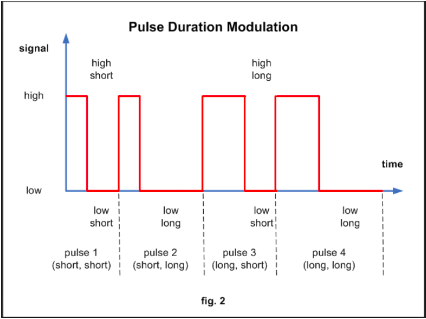
รูปที่ 2
วิธีที่ 2 Digital หรือ Index ขอย้อนกลับไปที่ไดร์ฟทั่วๆไป
จะมีฟีเจอร์ที่เราสามารถจ่ายสัญญาณ 24 Volt เข้าไปแล้วเราเลือกSpeed ได้ ตัวอย่างเช่น 00=10Hz,01=20Hz,10=30Hz,11=40Hz เป็นต้น
ทางฝั่งเซอร์โว มอเตอร์เอง ก็สามารถทำแบบนี้ได้เช่นกันโดยการตั้งค่า Index เพียงแต่ว่า เซอร์โว
มอเตอร์ต้องการข้อมูลมากกว่าฉะนั้นเราต้องกรอก ระยะทาง ความเร็วความเร่ง อัตตราเบรค เป็นต้น การใช้แบบ Index นี้เราไม่จำเป็นต้องใช้
PLC ก็ได้ ใช้เพียง Push Button ต่อเข้าที่ไดร์ฟแล้วให้ทำงานได้เลยข้อจำกัดของเทคโนโลยีนี้คือ
การที่เราจะเปลี่ยนพารามามิเตอร์ของ Index เราต้องทำผ่าน Softwareไม่สามารถทำได้ที่ไดร์ฟได้ ถ้าเรามีการเปลี่ยนพารามามิเตอร์บ่อยๆ
วิธีแบบนี้จะไม่เหมาะสมนัก
วิธีที่ 3 Analog ก็จะเหมือนกับไดร์ฟอีกเช่นกันสามารถจ่ายกระแส (Amp) หรือแรงดัน (Volt)เข้าไปสั่งมอเตอร์ได้โดยจะคุมได้แค่ความเร็วแต่ไม่สามารถสั่งระยะทาง
ได้ เทคโนโลยีนี้ไม่ต้องพึ่งพา PLC อีกเช่นกัน
วิธีที่ 4 Protocol เทคโนโลยีนี้จะต้องพึ่งพา PLC ในการสั่งการแก้ไขคอมมานแบบ Real Time ได้ พร้อมทำ Logic ที่ซับซ้อนได้
และยังสามารถทำฟังก์ชั่นซิงโครไนส์ร่วมกับเซอร์โว มอเตอร์ตัวอื่นได้ทั้งแบบ เกียร์ไฟฟ้า และลูกเบี้ยวไฟฟ้า (Cam)
ช่วยลดภาระในการใช้แมคคานิคจริงทั้งนี้ทั้งนั้นเราต้องดูความสามารถว่าไดร์ฟสื่อสารเป็น Protocol อะไรและสื่อสารกับ PLC รุ่นใดได้บ้าง
มักมีคอนโทรลเลอร์เฉพาะในการสั่งงานเซอร์โว มอเตอร์ประเภทนี้แต่ถ้าทำในรูปแบบ Message ผ่าน Protocol
ต่างๆจะไม่สามารถทำฟังก์ชั่นซิงโครไนซ์ได้ เช่น Modbus massageEthernet massage ถึงแม้จะสั่งงานผ่าน Protocol
เหมือนกันแต่ขีดความสามารในการสั่งงานต่างกัน โดย Allen Bradleyได้ออกเซอร์โว มอเตอร์ล่าสุด เรียกว่า Kinetix เป็นส่วนของเซอร์โว
ไดร์ฟ และมี CIP Motion ซึ่งเป็นการสั่งงานเซอร์ผ่าน Ethernetทั้งยังฟีเจอร์ ซิงโครไนซ์ได้ด้วย
ส่วนเทคโนโลยี Sercos ทาง Allen Bradleyได้ทำการหยุดพัฒนาไปแล้ว (เนื่องด้วยว่ามันช้ากว่า CIP motion)
สำหรับบทความฉบับนี้ผมขอหยุดเนื้อหาสาระไว้เพียงเท่านี้ถ้าหากท่านใดมีข้อสงสัยอื่นสามารถส่งมาถามได้หรือจะให้ทางเราเข้าไปอบรมเพิ่มเติมได้
และหวังว่าจะติดตามบทความของผมในฉบับต่อไป
สำหรับวันนี้สวัสดีครับ
ดาวน์โหลดคู่มือการใช้งานเซอร์โวมอเตอร์เบื้องต้น คลิก